|
|
By: Neil E. Cotter |
Motors |
|
|
|
Induction motors |
|
|
|
Torque vs speed |
|
|
|
Example 1 |
|
|
|
|
Ex: Consider the steady-state torque equation for an induction motor, [1], with the parameters listed below:
where τe ≡ torque (Nm)
np ≡ number of pole pairs
M ≡ mutual inductance of rotor and stator coils (H)
RR ≡ rotor resistance (Ω)
IS ≡ magnitude of stator current (A)
S ≡ slip (rad/s)
TR ≡ rotor time constant = LR/RR (s)
LR ≡ rotor inductance (H)
Use Matlab to make a plot of slip frequency, S, versus steady-state electrical frequency, ωe. Superimpose a plot of ω versus ωe. Assume the steady-state torque equals friction Bw. (Rewrite ω as ωe − S when solving for S. After you find S, use this equation again to calculate ω.) Use values of ωe in the range [1, 30] rad/s.
Note: The equation to be solved is a cubic in S. Use the smallest real root as the value of S. The Matlab function roots([1,a,b,c]) finds the roots of the following cubic polynomial:
![]()
Motor parameters:
![]()
![]()
![]()
![]()
![]()
![]()
Ref: [1] Marc Bodson, "Control of Electric Motors," 2004, University of Utah ECE Dept., eqn 4.62 p. 130.
Sol'n: Define a convenient constant to simplify notation
Setting τe = Bw and substituting for ω in terms of S, we have
Rearranging gives
![]()
Simplifying, we have a cubic equation for S:
We use Matlab to calculate S versus ωe and ω versus ωe, (see code below).
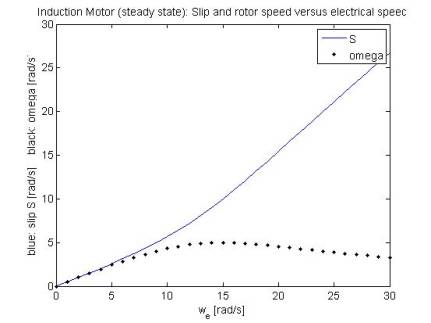
We observe that there is a peak motor speed for ωe ≈ 15 rad/s.
% ECE5570F05prob3soln.m
%
% Matlab code for plotting slip frequency S versus electrical freq w_e.
% For induction motor. Uses eqn 4.62 from "Control of Electric Motors"
% by Marc Bodson.
% Set values of motor parameters.
L_R = 2/100; % (H) = inductance of rotor
R_R = 2/10; % (ohms) = resistance of rotor
M = 1/100; % (H) = mutual inductance of stator and rotor
I_s = 200; % (A) = current in stator
J_motor = 5/100; % (kgm^2) = moment of inertia of motor (not used)
np = 1; % (-) = number of pole pairs
% Calculate rotor time constant.
T = L_R / R_R;
% Use figure 1 for all plots
figure(1)
% Create empty w_e_vec array so Matlab accepts later statements.
w_e_vec = [];
% Create empty Svec array so Matlab accepts later statements.
Svec = [];
% Plot S for values of w_e in range [1,5] rad/s.
for w_e = 0:1:30
% Build w_e vec.
w_e_vec = [w_e_vec, w_e];
% Set coeffs of polynomial to be solved. Polynomial eqn is:
% S^3 - w_e * S^2 + 2/T^2 * S - w_e/T^2 = 0
poly_coeffs = [1, -w_e, 2/T^2, -w_e/T^2];
% Find roots of polynomial.
S_vals = roots(poly_coeffs);
% Find real roots.
real_S_vals = S_vals(find(abs(imag(S_vals)) < eps));
% Use smallest real root.
S_min = min(real_S_vals);
% Add answer to array of S values vs w_e.
Svec = [Svec, S_min];
end
% Calculate motor speed, omega.
omega = w_e_vec - Svec;
% plot results
plot(w_e_vec, Svec, 'b-', w_e_vec, omega, 'k.')
xlabel('w_e [rad/s]')
ylabel('blue: slip S [rad/s] black: omega [rad/s]')